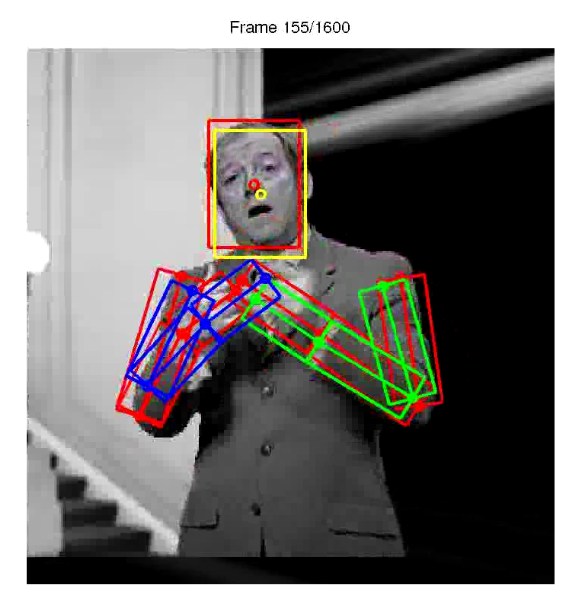
Fig. 1: Sign language (movie) |
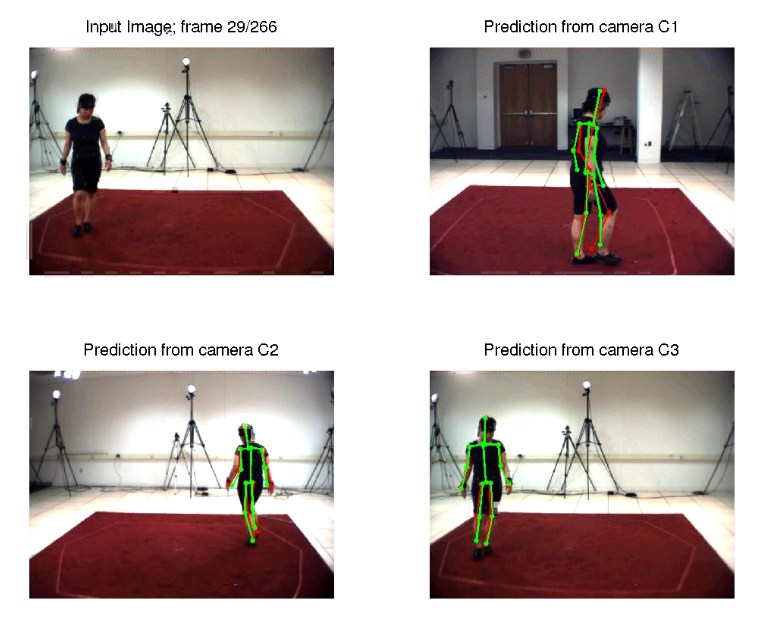
Fig. 2: Human Eva (frames in random order) (movie) |
Gaussian processes have been widely used as a method for inferring the pose of articulated bodies directly from image data. While able to model complex non-linear functions, they are limited due to their inability to model multi-modality caused by ambiguities and varying noise in the data set. For this reason techniques employing mixtures of local Gaussian processes have been proposed to allow multi-modal functions to be predicted accurately. These techniques rely on the calculation of nearest neighbours in the input space to make accurate predictions. However, this becomes a limiting factor when image features are noisy due to changing backgrounds. In this paper we propose a novel method that overcomes this limitation by learning a logistic regression model over the input space to select between the local Gaussian processes. Our proposed method is more robust to a noisy input space than a nearest neighbour approach and provides a better prior over each Gaussian process prediction. Results are demonstrated using synthetic and real data from a sign language data set and the HumanEva dataset.
For more details see:
Martin Fergie and Aphrodite Galata, `` Local Gaussian Processes for Pose Recognition from Noisy Inputs'', Proc. British Mashine Vision Conference (BMVC), 2010 ( .pdf ).
|
Fig. 1: Sign language (movie) |
Fig. 2: Human Eva (frames in random order) (movie) |
Back to Aphrodite's Home Page